
Мобильные роботы
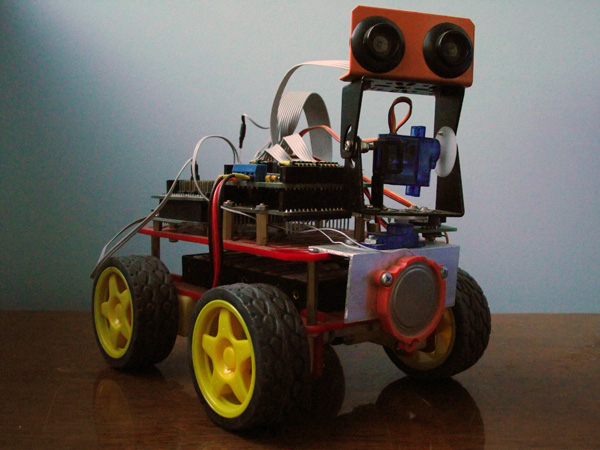
Это продолжение статьи « Управляем мобильным роботом через блютус ». В этом проекте демонстрируется технология беспроводной связи Bluetooth , которая позволяет дистанционно управлять мобильным роботом с помощью сотового телефона. Робот и мобильный телефон связываются через Bluetooth соединение. Команды управления движением передаются в контроллер робота при нажатии на соответствующие кнопки телефона. Главное назначение этой статьи — показать ход мыслей и последовательность действий при разработке проекта. Для понимания статьи необходимо начальное знание основ программирования на языке Java.















На сайте 3D Control вы можете запросить презентацию нужного вам оборудования и заказать поставку в свой регион. Специалисты нашей компании проконсультируют вас по вопросам приобретения мобильного робота Phollower и другого 3d-оборудования. Для получения бесплатной консультации свяжитесь с менеджером нашей компании через форму на сайте, почту info 3dcontrol. Мы предлагаем оптимальные решения для конкретных задач и отраслей промышленности. Главная Каталог оборудования Автоматизация и роботизация Автоматизация производственных процессов Мобильный робот Phollower







Учебный комплект представляет собой образовательное решение на базе открытой робототехнической платформы TurtleBot3. Комплект предназначен для углубленного практико-ориентированного изучения основ разработки систем управления автономных мобильных роботов. Учебный комплект для изучения автономных мобильных роботов представляет собой макет мобильного робота, оснащенный четырьмя ведущими колесами на базе автоматизированных сервомодулей Dynamixel, бортового вычислительного микрокомпьютера, периферийного контроллера, системы питания и лазерного сканирующего дальномера. Мобильная робототехническая платформа представляет собой шасси с кинематикой дифференциального типа, предназначенное для применения в практико-ориентированных проектах учащихся старших классов и студентов технических ВУЗов. Использование мобильной робототехнической платформы позволяет изучить все аспекты управления мобильными роботами, а также обеспечивает возможность эксплуатации в учебных и исследовательских целях при реализации практико-ориентированных проектов.





Похожие статьи
- Автомобильные перчатки без пальцев своими руками - Женские перчатки - купить итальянские женские пер
- Из автомобильных покрышек своими руками мастер класс
- Проверка подвески опель астра н - Lada Vesta - - автомобильный портал
- Колесо ленточной пилы своими руками - ПОТ РО- Правила по охране труда на автомобильном